cyglidar-1
https://github.com/CygLiDAR-ROS/cyglidar_d1
GitHub - CygLiDAR-ROS/cyglidar_d1
Contribute to CygLiDAR-ROS/cyglidar_d1 development by creating an account on GitHub.
github.com
https://95mkr.tistory.com/entry/ROS1?category=746766
[ROS] 1. SD 카드에 이미지 삽입, 포맷 그리고 백업
☞ 메인보드 : Jetson Nano Developer Kit ☞ 운영 체제 : Ubuntu 18.04 - JetPack 4.3 목차 ○ 이미지 삽입 ○ SD 카드 포맷 ○ SD 카드 백업 ○ 요약 ① 이미지 삽입 ☞ Rufus 다운로드 Rufus - The Official We..
95mkr.tistory.com
https://orasman.tistory.com/457
[CygLidar] 라즈베리파이 3B에 ROS깔고 CygLiDAR 연결하기
CygLiDAR 사용기를 정리하는 중... <요약> >>라즈베리파이 2 시리즈는 조금 느리다 (비추) >>라즈베리파이 3B에 ROS가 미리 설치된 우분투 이미지를 설치한다 https://downloads.ubiquityrobotics.com/pi.html..
orasman.tistory.com

드디어 3d 라이다를 받았다.. 사실 1주일 전쯤에 받았는데 웹쪽으로 열심히 하고 있어서
이제야 건드리기 시작했다.

사실 받자마자 윈도우에서 viewer로 돌려받고 성공적으로 기능들을 다 테스트 완료해서 약간 자만한것도 있었다...

우선 sd카드를 리더기로 읽어 포멧을 해준다.
그리고 관련 레퍼런스 사이트가 라즈베리로 했기에 라즈베리에 ROS가 깔려있는 ubuntu를 설치해준다.
https://downloads.ubiquityrobotics.com/pi.html
나는 레퍼런스사이트와 동일하게 2020-02-10으로 다운받았다.

etcher는 처음써보는거였지만 전에 imager 를 써봐서 그런지 그냥 손쉽게 잘 되었다

그러면 이제 화면에 ros가 깔려있는 ubuntu가 나오는데 바탕화면부터 ros스럽다.
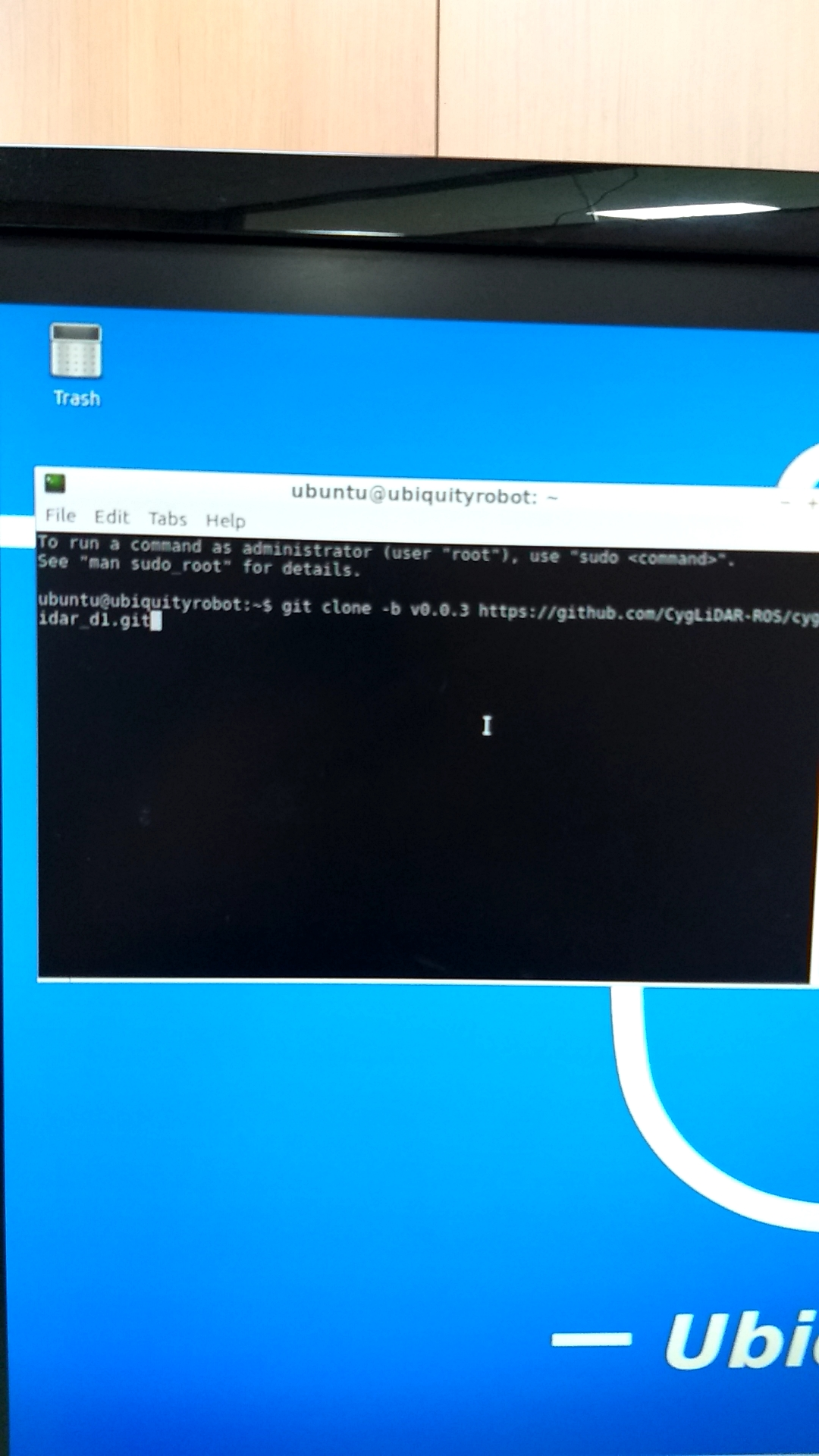
이건 내가 잘못한건데 catkin_ws/src에서 git clone 해야한다.
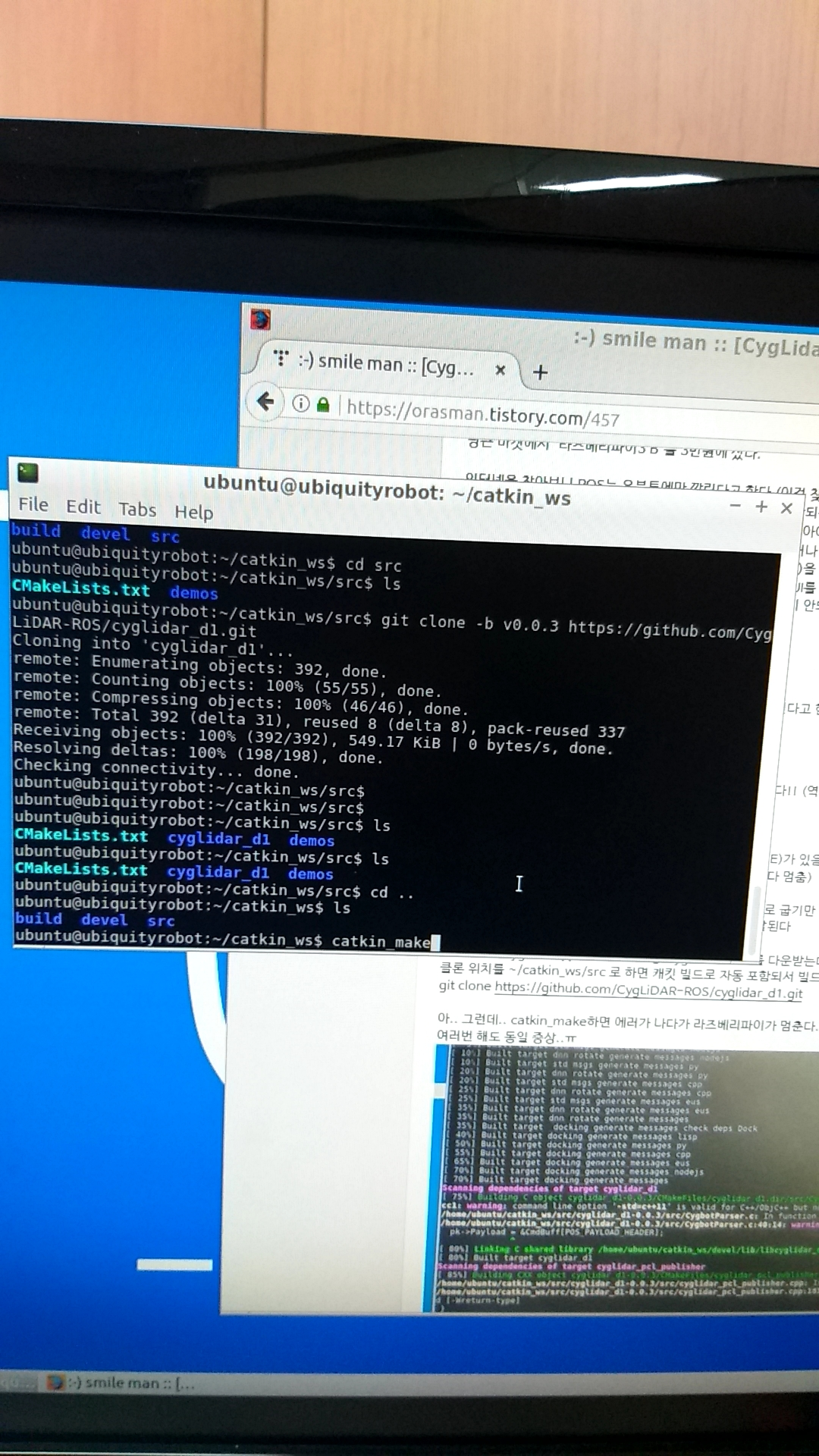
레퍼런스 사이트의 과정을 충실히 잘했다면
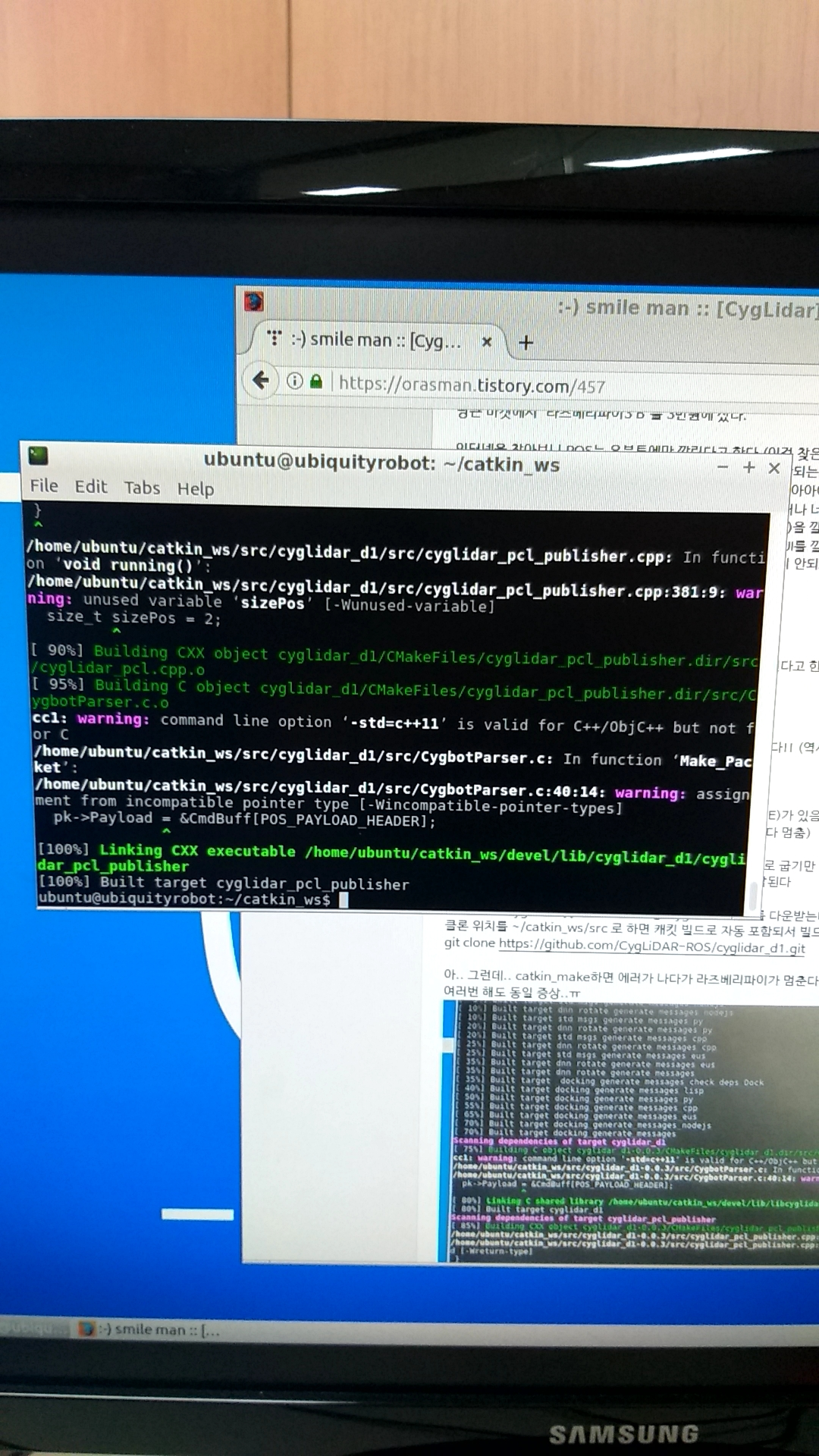
이런화면이 뜨며 make가 끝난다.
하지만 화면이 정상적으로 출력되지 않았는데 이유는 내가 lsusb 했을때는 3dlidar가 잡혀서 그냥 진행했는데
사실 빼먹은 과정이 있기 때문이다.
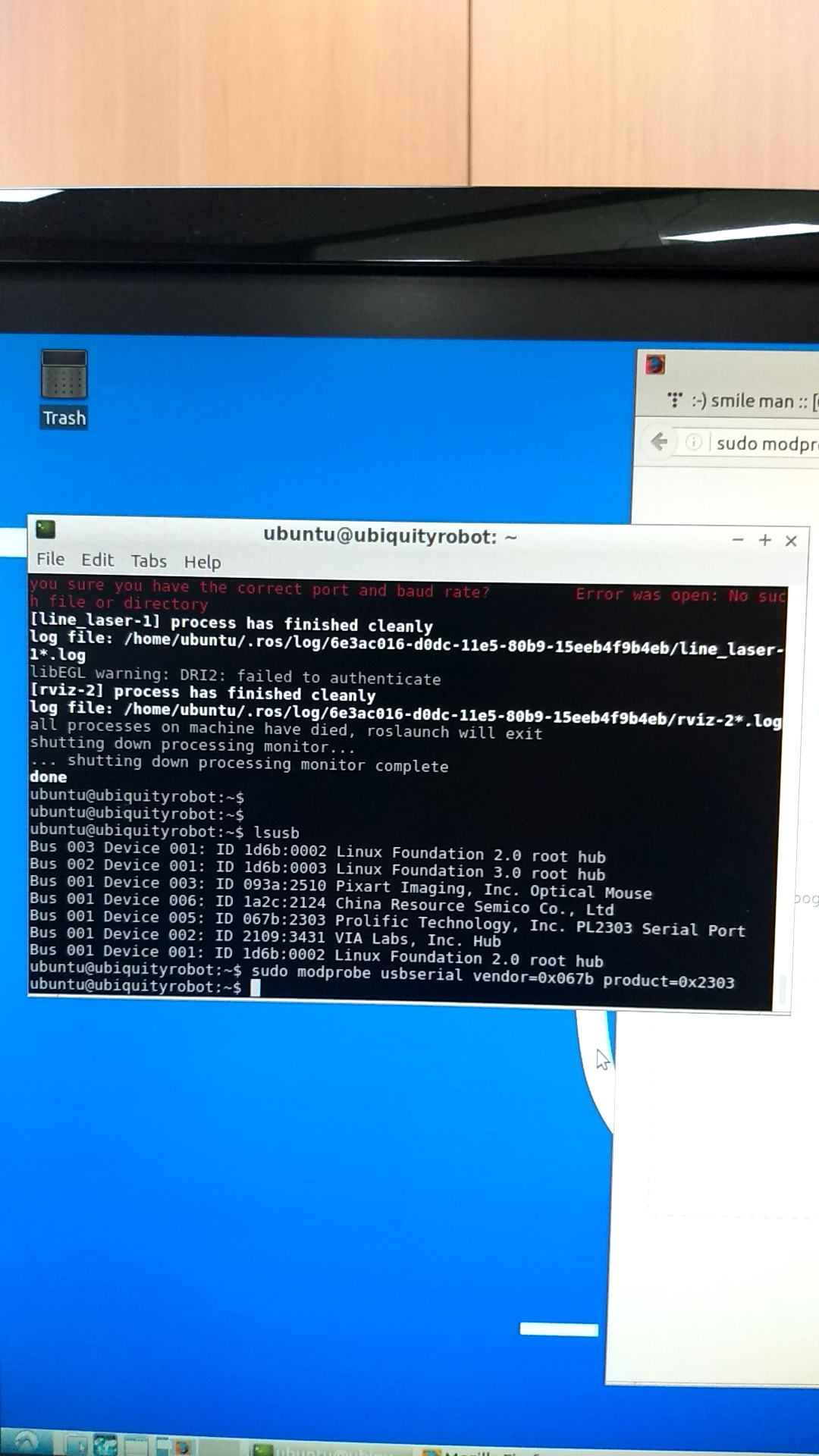
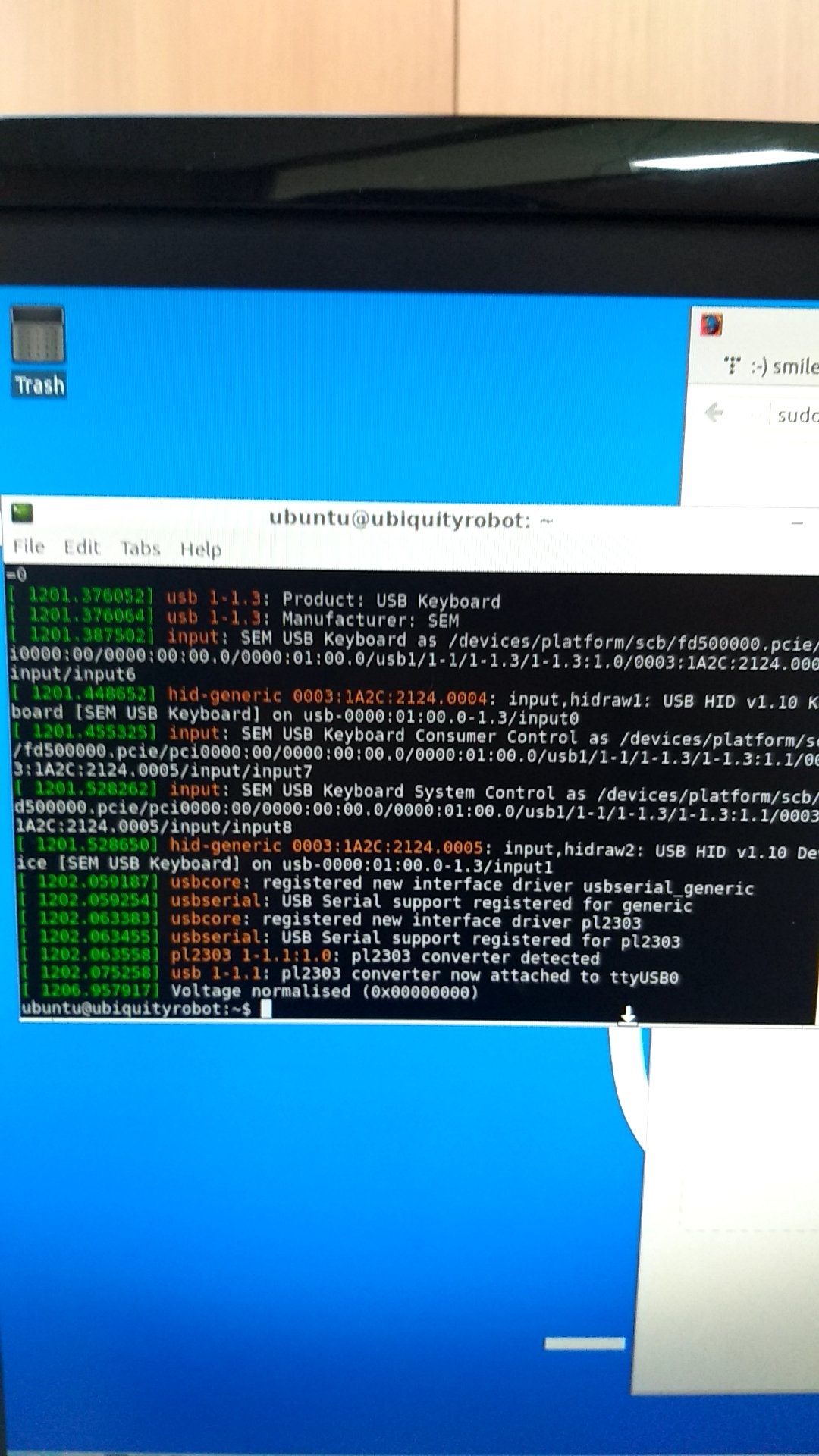
https://belitino.tistory.com/140
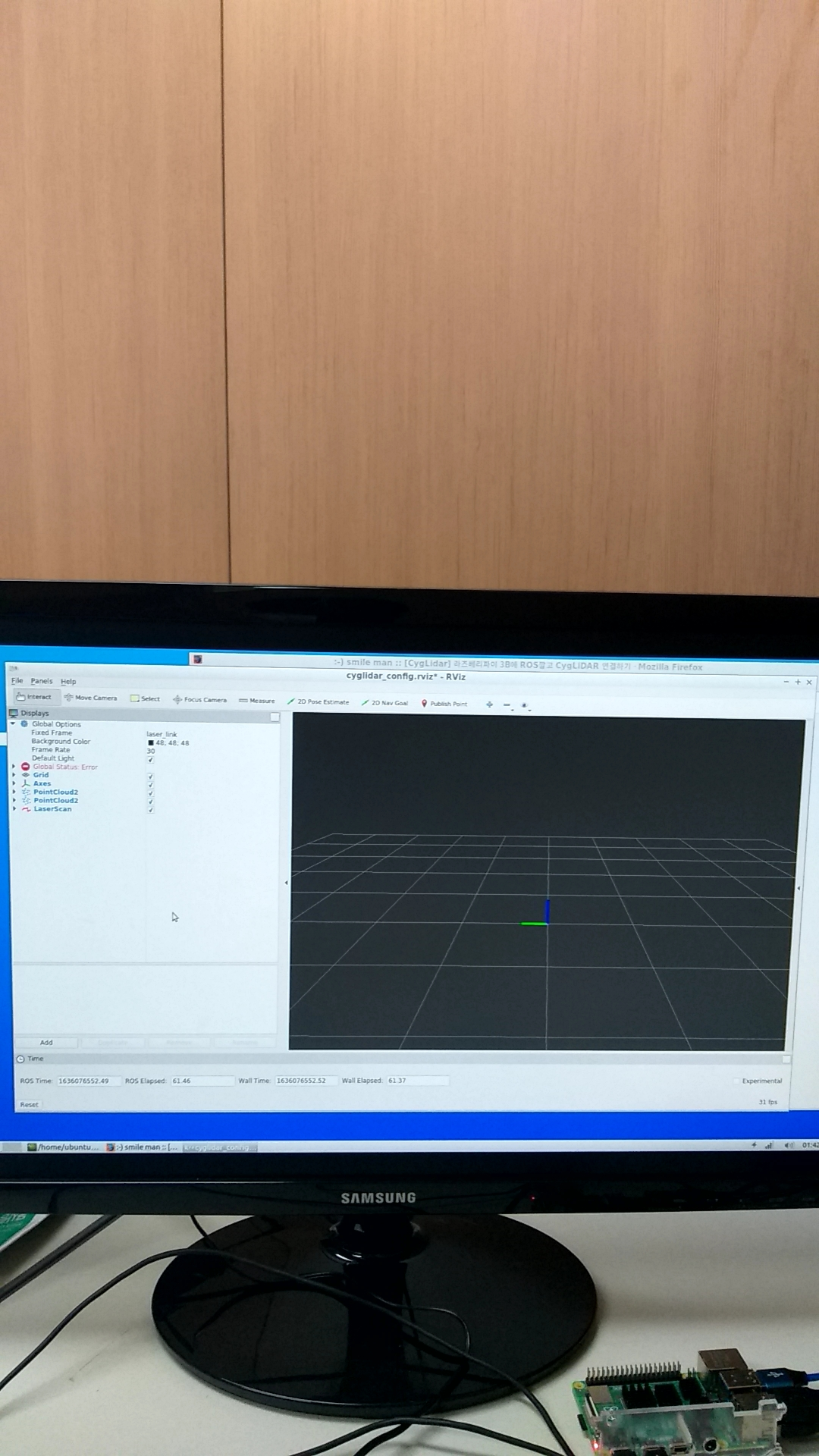
이 사이트에 나와있는대로 코드를 잘 진행하면 위와 같은 화면이 뜬다.

이제 rviz에서 3dlidar의 화면을 잘볼수있다.

2D로 값을 잘 받아낸다.
이제 통신을 할 차례인데 라즈베리에 깔린 ros 버전을 보니 kinetic이고 xavier는 kinetic을 깔수가 없다.
(라즈베리는 16.04 , xavier는 18.04라서 그렇다..)
하지만 잘 찾아본결과 둘은 통신이 가능하다는 정보를 얻었고 바로 진행해보기로 했다.
https://answers.ros.org/question/315600/can-ros-kinetic-and-melodic-be-mixed-on-the-same-network/

우선 xavier에 ros melodic을 깔아준다.
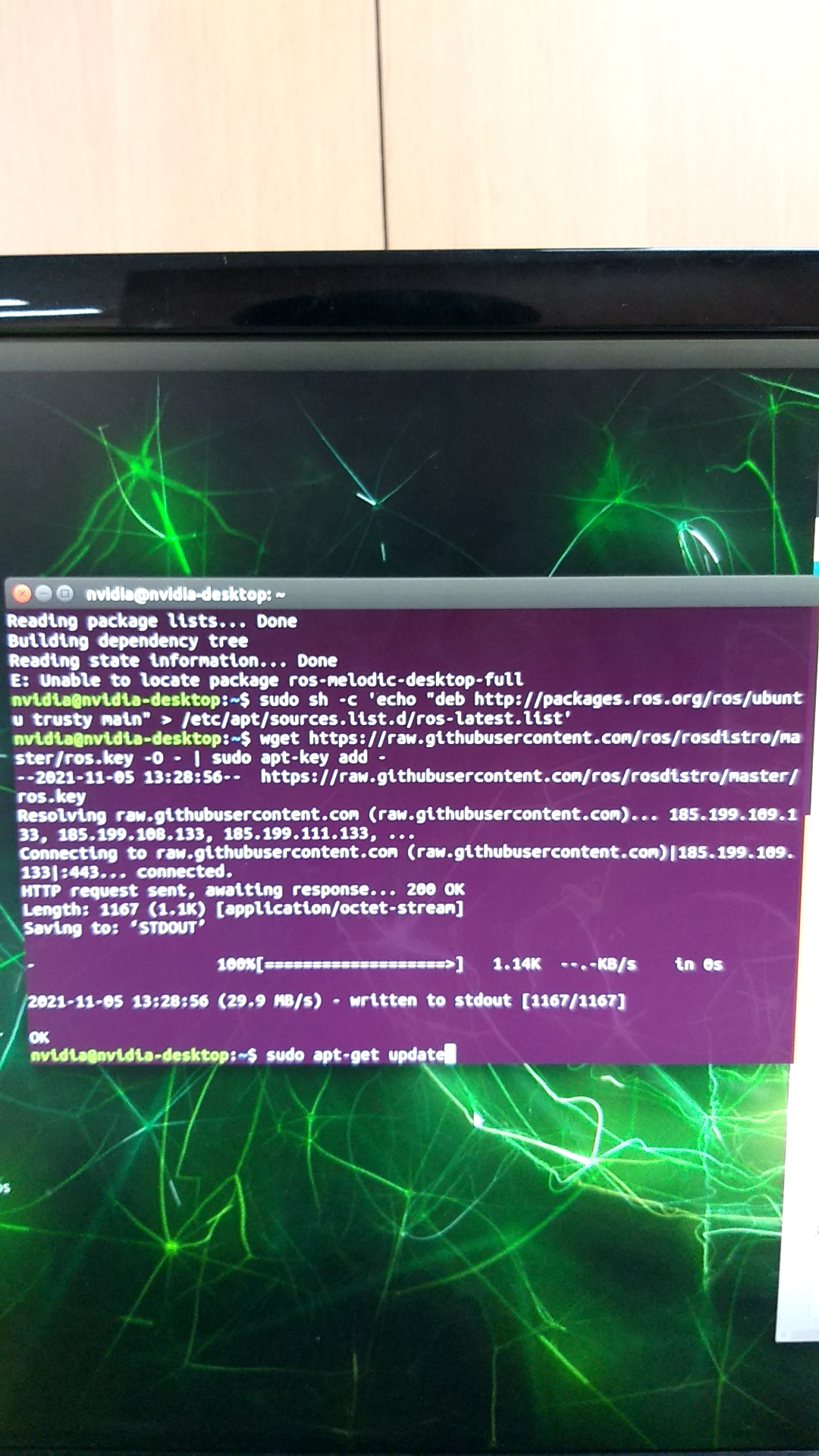
깔다보면 ros full버전을 깔때 e:unable to locate오류가 뜰텐데
그럴 결우 update를 하고 터미널을 껏다켜보고 그래도 안되면 xavier를 재부팅 한 후 다시 해보길 바란다.
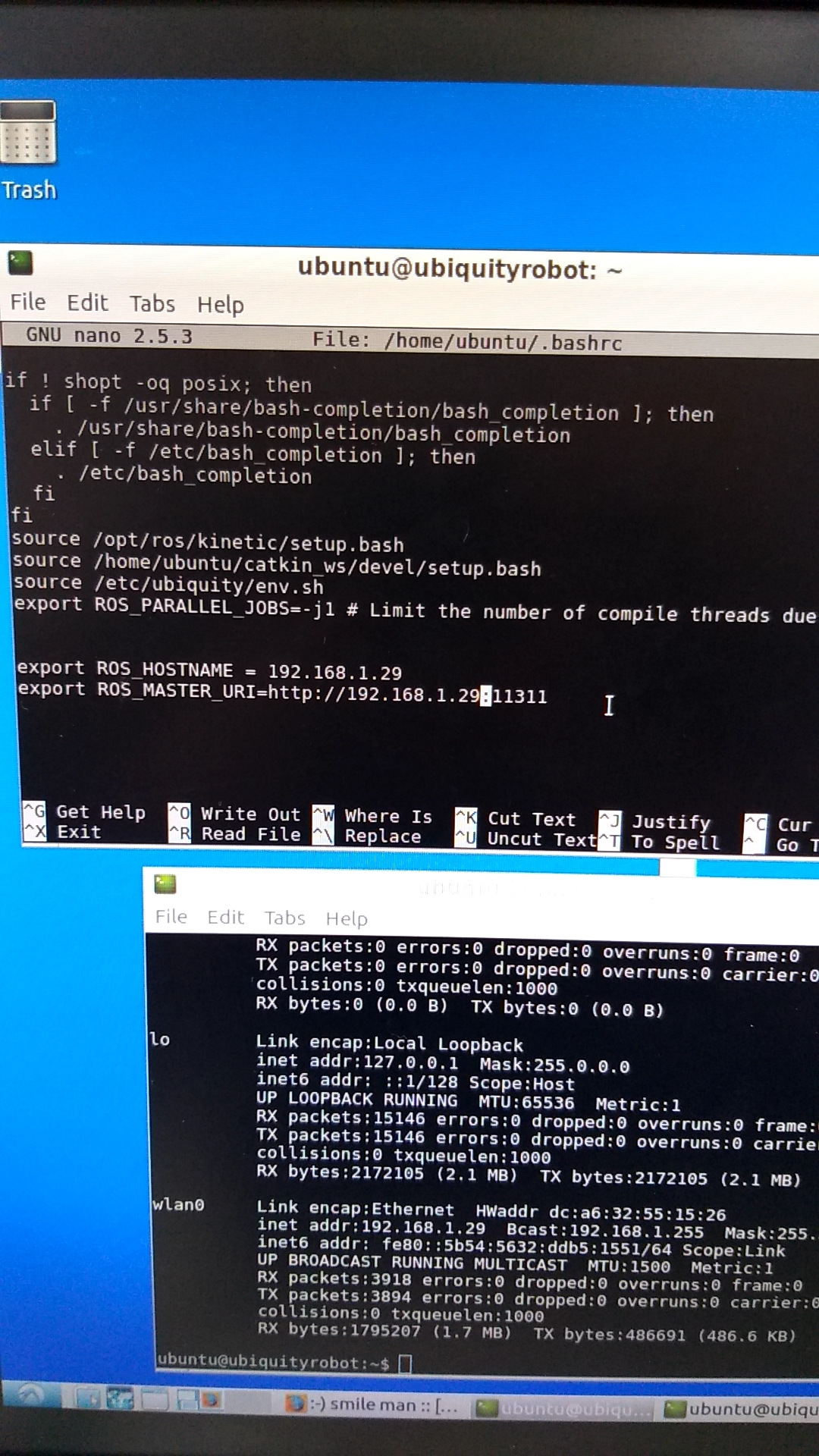
레퍼런스 사이트에 나와있는 그대로 진행한다.
라즈베리의 와이파이 ip , 즉 wlan0의 주소를 받아
bashrc에 입력한다.
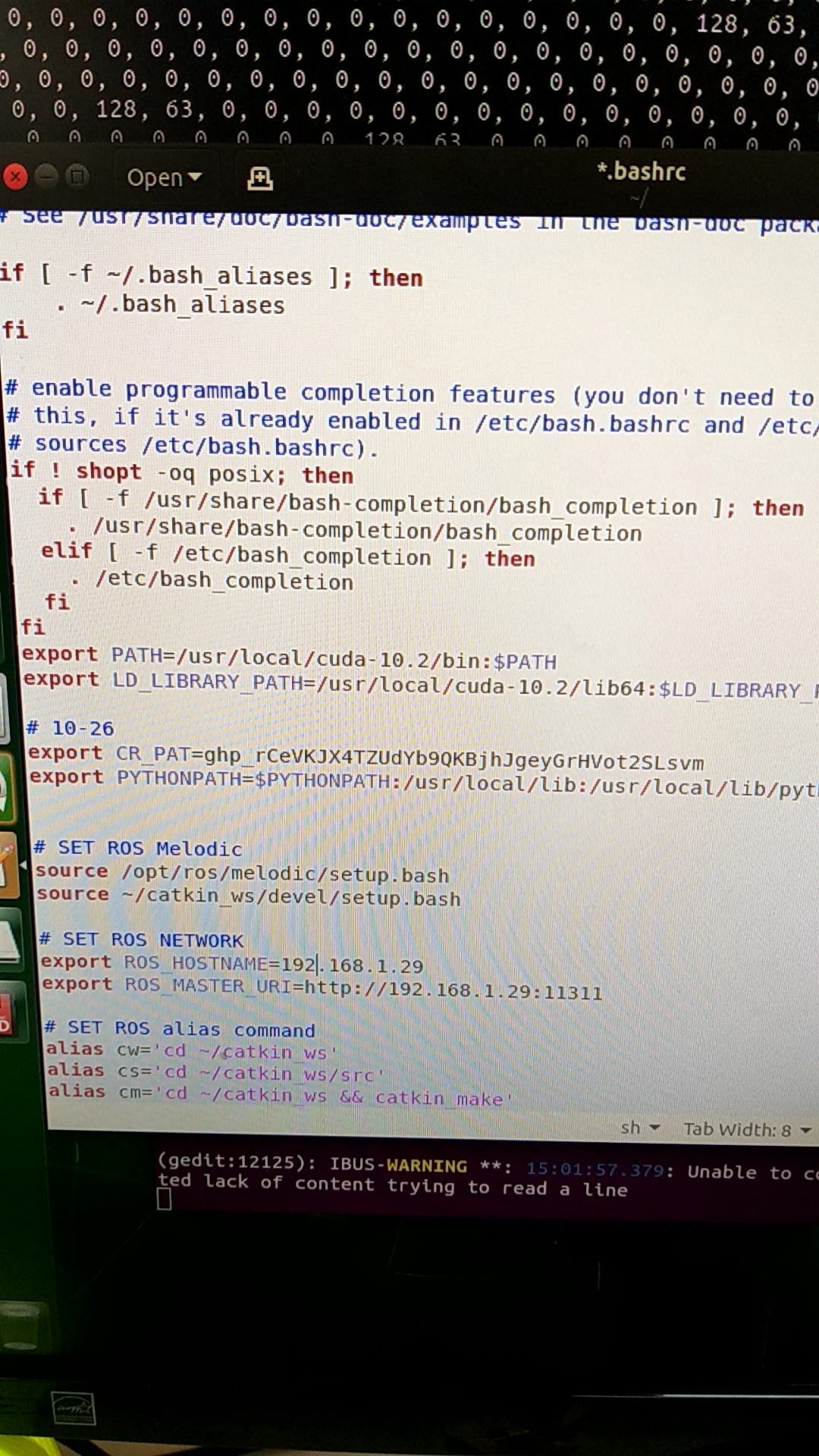
또한 xavier에서도 그대로 bashrc에 라즈베리에서의 ip를 넣어준다.
이제 나온대로 라즈베리에서 roscore를 실행하면 되는데
만약 저런 오류가 뜬다면
https://answers.ros.org/question/172879/kill-other-roscoremaster-processes-on-bourn-shell/
Kill other roscore/master processes on bourn shell - ROS Answers: Open Source Q&A Forum
Kill other roscore/master processes on bourn shell edit I keep getting this error message when trying to run roscore: roscore cannot run as another roscore/master is already running. Please kill other roscore/master processes before relaunching. However, I
answers.ros.org
여기 나온대로 하면된다.
잘 통신이 되었는지 확인하는 과정 1

잘 통신이 되었는지 확인하는 과정 2
잘 나온다 굳굳!