전에 비트교육센터에 오신 박철 대표님의 회사에서 협업을 해보는 게 어떻냐고 얘기가 나와서 같이 하는 방향으로 프로젝트가 진행되었다.
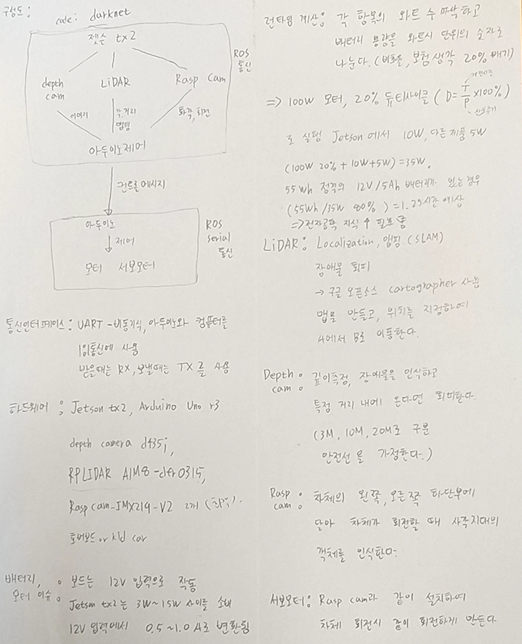
그래서 9/10날 박철 대표님의 회사로 갈 때 우리가 지금 준비하고 있는 프로젝트의 개발 스펙과 방향 같은 것을 좀 정리해봤는데

나름 이렇게 정리를 하고 드디어 금요일날 회사에 찾아갔다.
회사에 도착하고 제일 먼저 반겨준것은 하드웨어적으로 많이 완성되어 있는 우리가 기획한 로봇이었다.

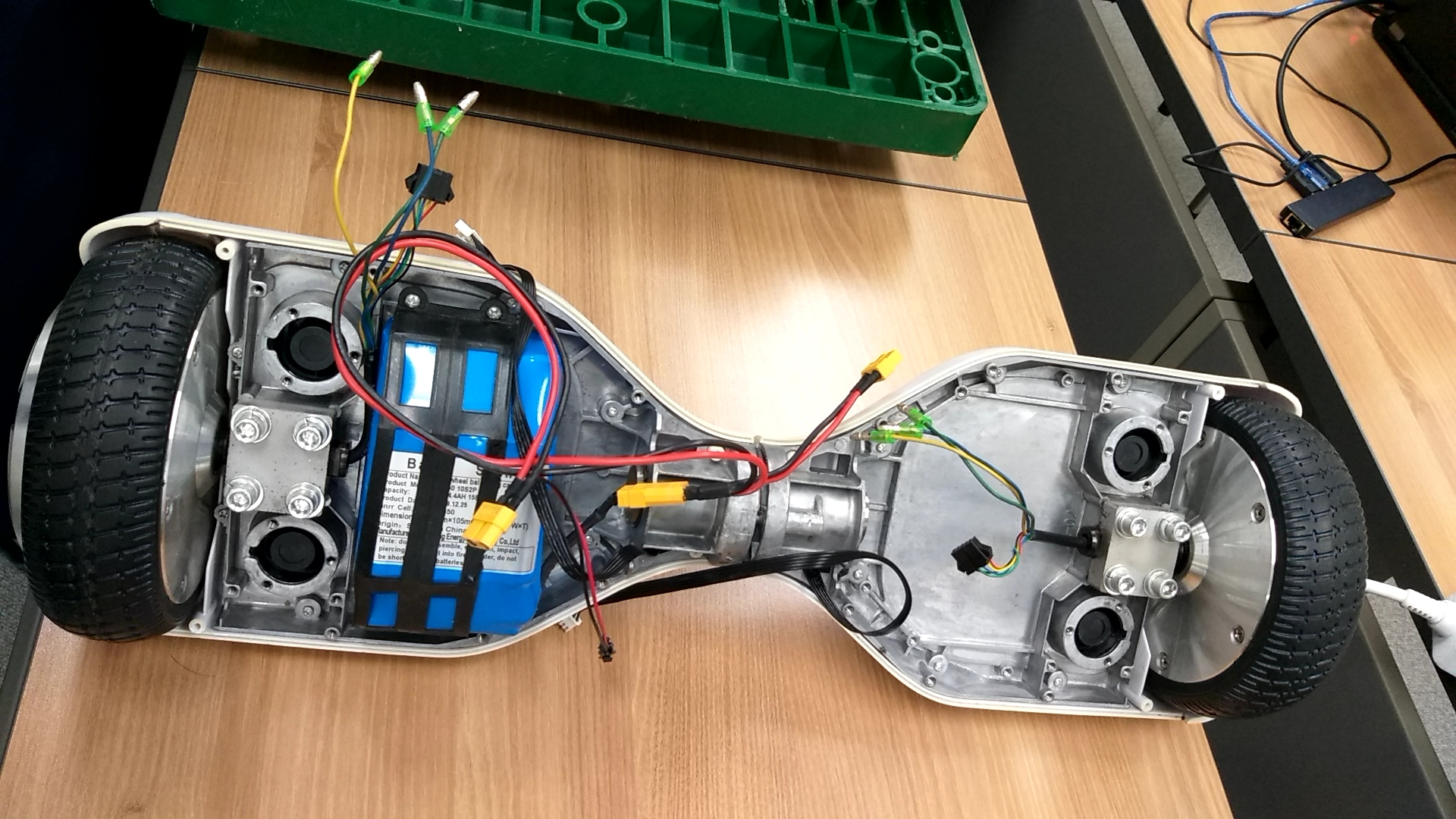

대표님께서는 지난 1년간 호버보드를 이용해서 하는 교육아이템을 기획 중이셨는데 그 진행 중의 데이터가 부족하셔서 우리와 협업한다는 것이었다.
우리는 너무 감사하게도 다양한 도움을 받을 수 있어서 그야말로 윈윈이었다.(솔직히 지금도 대표님께는 우리만큼의 이익이 있는지는 잘 모르겠다...)
실제 회사에서 경험하고 체험한 것은 먼저 호버보드를 아두이노 IDE로 제어한 것과 그 호버보드를 팔레트에 합쳐 아두이노와 노트북을 연결하고 이제 직접 밖에서 주행한 것이다.
회사에 프로토타입 두개가 있었는데 하나는 대형 팔레트에 호버보드 바퀴 4개, 보조바퀴 1개였고 다른 하나는 중형 팔레트에 호버보드 바퀴 2개 보조바퀴 2개였다.
우리는 크기문제로 일단 중형으로 테스트를 진행하고 나중에 대형으로 옮기기로 결정했다.
지금까지는 가상으로만 기획하던 프로젝트가 실물을 겪고 나니 놀랍기도 하고 프로젝트가 많이 커진 것 같기도 했다...
솔직히 요즘은 부담감이 조금 있다. 도전은 언제나 즐거웠지만 다른 사람들과 다 같이 진행을 하니 망치면 안 된다는 중압감 때문인지 계속해서 할 일이 척척 나오는 게 적절한 일의 강도지만 꾸준히 나와서 체력이 소진된 것인지 충전이 필요하다는 생각이 조금은 든다.
이 날은 학원의 박희진 강사님도 같이 와주셨는데 여러가지 힌트들을 많이 주셨다. tensorRT, 칼만 필터, 보드를 두 개는 써야 할 수 있다는점 특히 이 보드를 두 개 써야 한다는 점은 우리가 은연중에 계속 보드는 하나만 쓸 것이라는 생각을 뒤집는 것으로 강사님은 분명 두 개를 써야 될지도 모른다고 하셨지만 이건 거의 무조건 두 개를 써야 한다고 받아들여야 한다고 생각한다.
내가 준비했던 해결해야 할 점들은 일단 전부 해결된 것이
1. 뎁스 캠은 윈도로 먼저 돌려보고 테스트해보기
2. 하드웨어 디자인 상당히 진척이 있었음
3. 다크넷 코드에 구동체 코드를 잘 연결시키는 것 -> 이미 데이터가 있다 그거 먼저 잘 분석할 것
4. 카메라를 회전시키는 것은 보류하기로 했다. 신경 써야 할 것이 너무 많기 때문이다.
이로써 이제 다음 주에 완성해야 할 것은 크게 두 가지로
1. 미니 프로젝트-욜로로 데이터셋 분석하여 객체인식
2. 하드웨어 디자인 완성
을 목표로 잡기로 했다.
'embedded > 자율주행 로봇 프로젝트' 카테고리의 다른 글
| 프로젝트 발표 영상 (0) | 2022.01.10 |
|---|---|
| depth & design (0) | 2021.09.14 |