다시금 jetson nano로 처음부터 시작한다. 하지만 전과는 조금 다른게 이제는 많은 시행착오를 겪으며
어떻게 시작해야 할지를 조금 알게 된 것 같다.

다시 돌아온 날 힘들게 한 nvidia사이트 개발자 킷 이제는 익숙하다.
이번에 참고하는 사이트는
https://95mkr.tistory.com/category/IT/ROS
'IT/ROS' 카테고리의 글 목록
누워있는 개발자
95mkr.tistory.com
(혹여 문제가 된다면 언제든지 연락주세요.)
이 사이트의 개발환경이
☞ 메인보드 : Jetson Nano Developer Kit
☞ 운영 체제 : Ubuntu 18.04 - JetPack 4.4.1
☞ ROS 버전 : Melodic
☞ IDE : Visual Studio Code & Arduino
☞ 언어 : C++
이랬기에 나는 최대한 이 환경에 맞추어 가려고 한다.(이 분도 과거에는 4.3.0을 썼지만 4.4.1에서 opencv 4를 지원해주어서 4.4.1로 바꾼것으로 안다.)


익숙했던 그 과정들을 잘 나아가면
참고:https://crablab.tistory.com/2
익숙한 그 화면이 다시 나온다. 약간 나중에 포기했다. 다시금 보스전에 도전하는 느낌이다.

업그레이드와 언어팩을 설치하고 리붓한다.
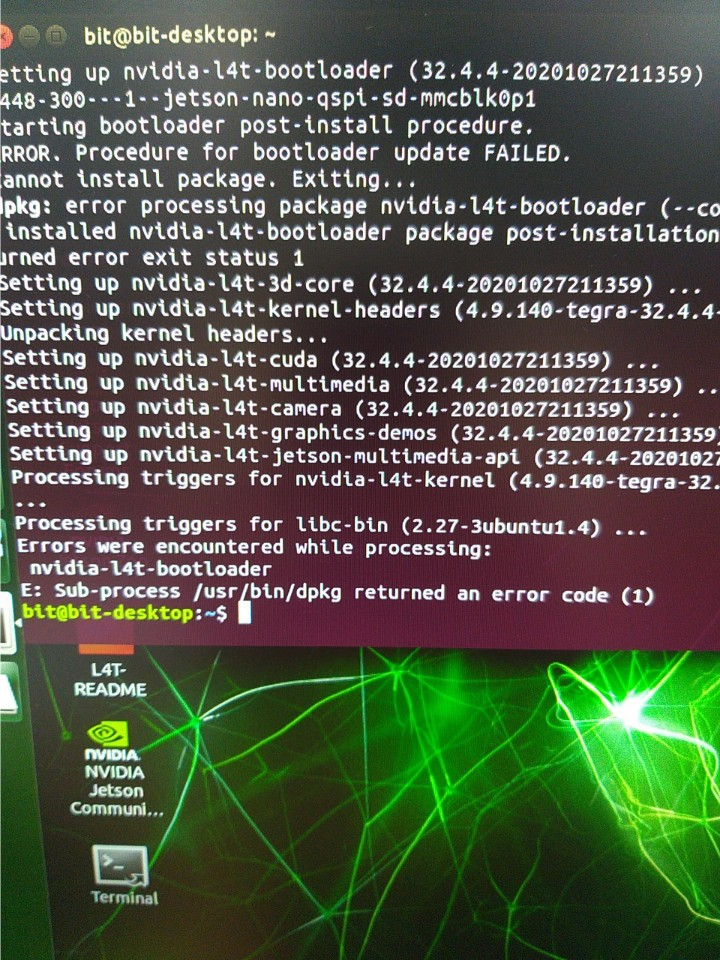
다시 나온 부트로더도 그때 방법으로 해결해준다.
https://www.codeleading.com/article/30734974788/
error汇总:dpkg: error processing package *** (--configure) - 代码先锋网
jetson nano(Ubuntu)在进行更新时报错: Setting up nvidia-l4t-bootloader (32.4.4-20201027211359) ... 3448-300---1--jetson-nano-qspi-sd-mmcblk0p1 Starting bootloader post-install procedure. ERROR. Procedure for bootloader update FAILED. Cannot in
www.codeleading.com
여기까지 진행하고 다음에 본격적으로 ROS Melodic을 설치해야겠다.
'embedded > ROS' 카테고리의 다른 글
| 6. ROS & opencv (cv_bridge) 실시간 스트리밍...성공! (1) | 2021.09.01 |
|---|---|
| 5. ROS & opencv (cv_bridge) 실시간 스트리밍...실패 (0) | 2021.09.01 |
| 4. pub & sub 메시지 통신 (0) | 2021.08.31 |
| 3. ROS 설치완료 (0) | 2021.08.31 |
| 2. ROS-Melodic 설치 (0) | 2021.08.30 |