반응형
지난번에 부트로더 오류를 잡았기에
순조롭게
sudo apt update
sudo apt upgrade를 진행할 수 있다.
그런 다음
sudo apt autoremove
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu ${lsb_release -sc} main" > /etc/apt/sources.list.d/ros-latest.list'
// 유저가 http://packages.ros.org에 접근할 수 있도록 source.list.d에 저장소(Repository)를 추가하자.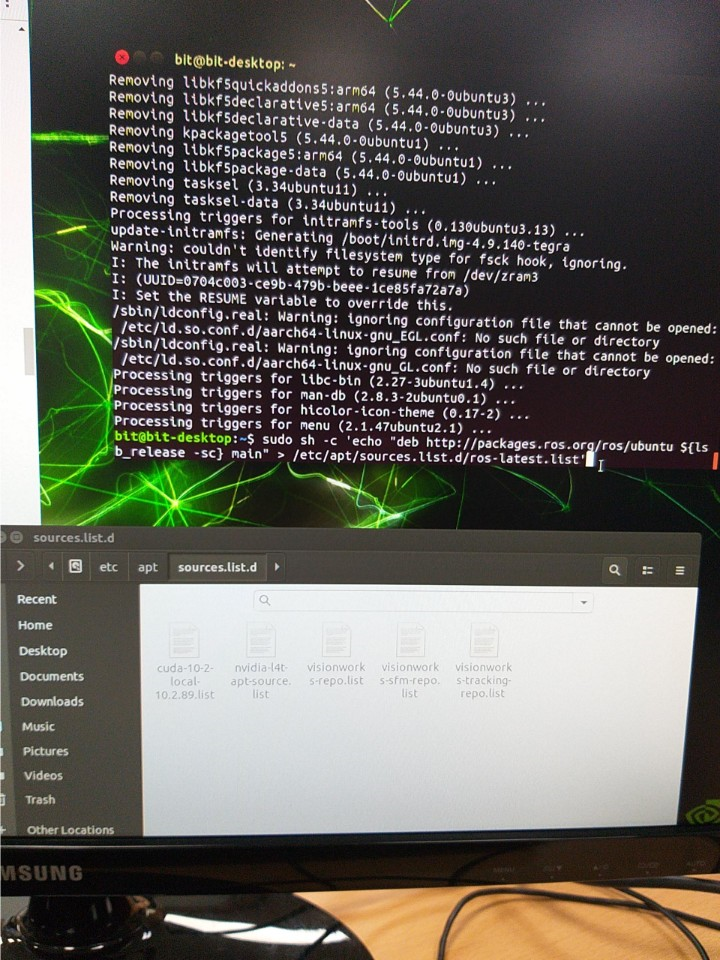
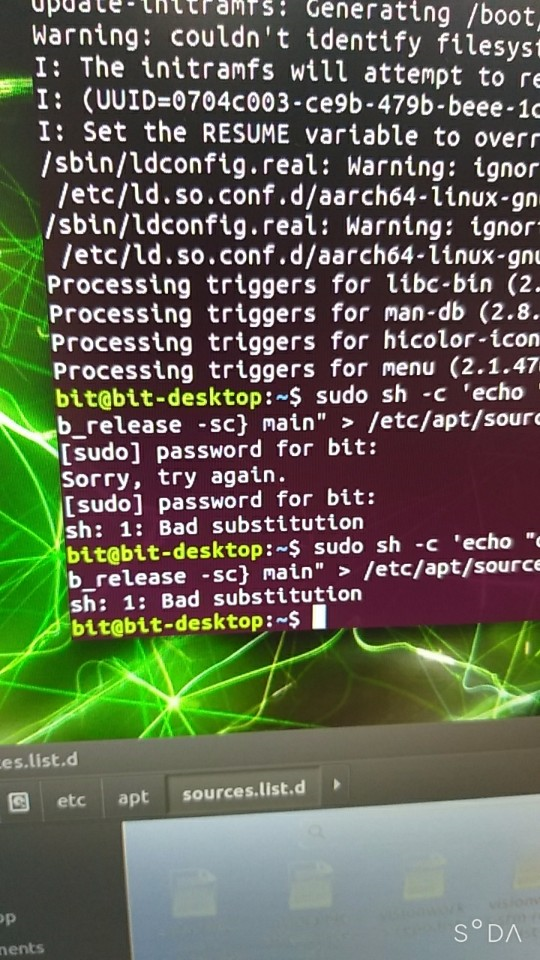
나의 경우 bad substitution이란 치환오류가 발생했는데 레퍼런스 사이트에 나온대로
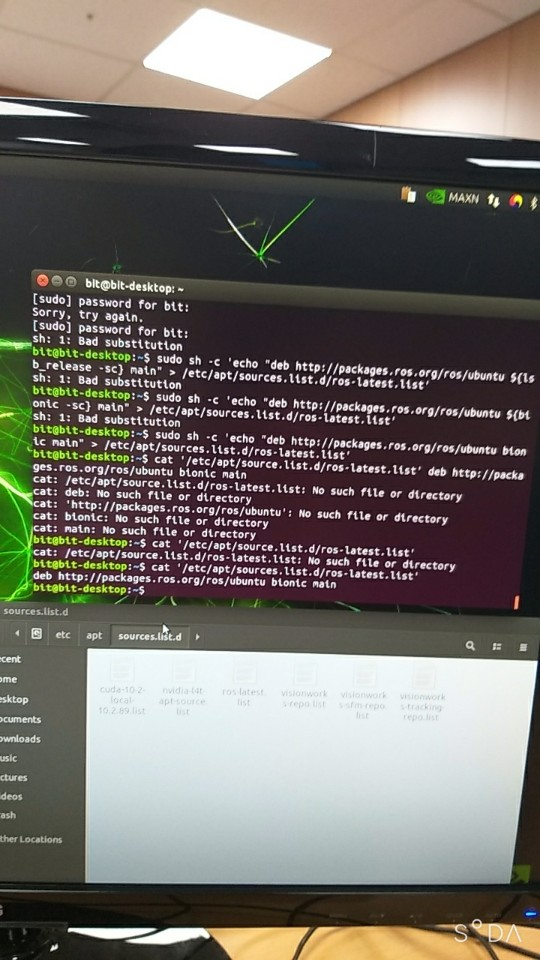
${lsb_release -sc}를 bionic으로 변경해서 타이핑하니 괜찮아졌다.
계속해서 위의 사진의 cat '/etc/apt ~ bionic main 을 타이핑하고
(입력하면 결과로 "deb http://packages.ros.org/ros/ubuntu bionic main"이 출력된다.)
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654를 통해
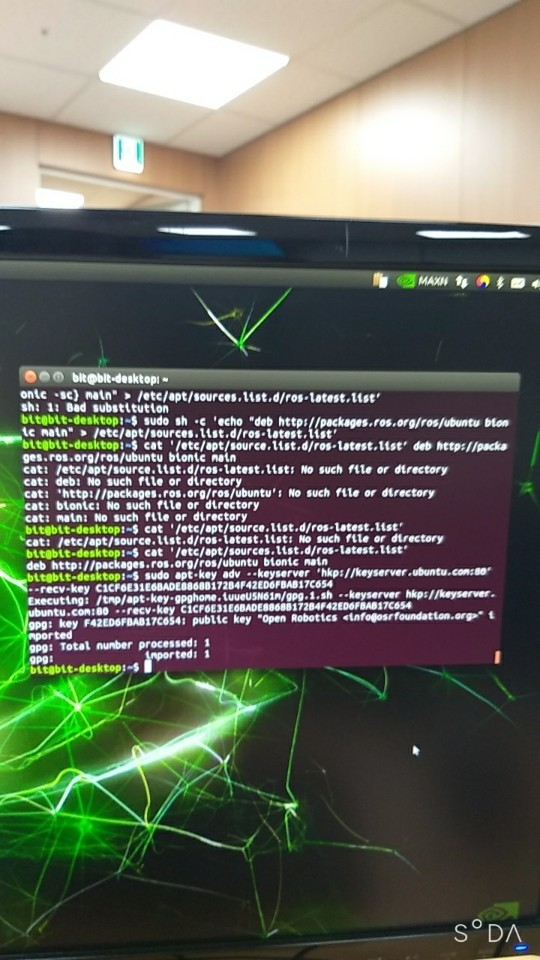
이 결과가 나오면 성공이다.
레퍼런스 사이트에 설명이 참 자세하고 친절하게 잘 되어있던데 우선 내가 항상 생각하는 "대충->빨리->잘"의 순서로
이 과정의 구현을 끝내야 이 코드들의 의미를 좀 더 잘 알 수 있을거같다.
이제 ROS Melodic을 설치해야한다.
sudo apt update
sudo apt install ros-melodic-desktop
//sudo apt install ros-melodic-desktop-full
//위에는 풀버전으로 받으면 좋지만 이 과정에서 데스크탑으로 진행하여 우선 데스크탑으로 진행한다.
sudo apt-get install python-pip
sudo pip install -U rosdep
sudo rosdep init를 진행하고

이 나오면
rosdep update
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc를 진행한다.
이제 위 내용이 제대로 입력되었는지 확인하고 싶으면,
sudo [편집기] ~/.bashrc를 사용한다.
이 다음은 의존성 빌드 패키지를 다운로드 해야한다.
반응형
'embedded > ROS' 카테고리의 다른 글
| 6. ROS & opencv (cv_bridge) 실시간 스트리밍...성공! (1) | 2021.09.01 |
|---|---|
| 5. ROS & opencv (cv_bridge) 실시간 스트리밍...실패 (0) | 2021.09.01 |
| 4. pub & sub 메시지 통신 (0) | 2021.08.31 |
| 3. ROS 설치완료 (0) | 2021.08.31 |
| 1. ROS 시작 (0) | 2021.08.30 |